はじめに
ロボット技術が進化する中で、人間に似せたデザインが注目されています。しかし、ロボットが人間に近づくにつれ、心理的な違和感や不快感を覚える「不気味の谷現象」が発生することがあります。この現象は1970年に日本のロボット工学者・森政弘によって提唱されました。
本記事では、不気味の谷現象の概要と、そのフェーズごとのロボットの具体例を紹介し、この現象を理解する手助けをします。
不気味の谷現象とは
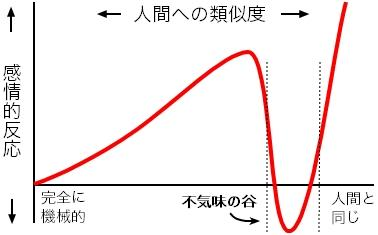
不気味の谷現象とは、ロボットや人工物が人間に似るほど、あるポイントを境に嫌悪感や不快感が急激に増す心理現象を指します。ロボットが初めは親しみを感じられるデザインであっても、人間にあまりにも似てくると、そのわずかな違和感が「不気味」として感じられるようになります。
不気味の谷現象は、ロボットのデザインやAI技術の進化において重要な課題であり、人間がロボットを受け入れやすくするための工夫が求められています。
不気味の谷のフェーズと具体例
不気味の谷現象は、ロボットの外観や動きが人間に近づくにつれ、以下の4つのフェーズに分類されます。
フェーズ1: 明確にロボットと認識できる段階
この段階では、ロボットが明らかに機械的であり、人間とは異なる外観を持っています。完全にロボットとして認識されるため、違和感はほとんどありません。
具体例:
- ルンバ(iRobot): 明確に掃除ロボットとわかるデザイン。
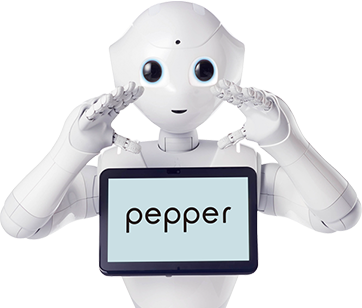
- Pepper: 人型ながらシンプルで機械的なデザインが特徴。

フェーズ2: 人間に似ているが、違和感が少ない段階
ロボットが人間の特徴を少しずつ持ち始めますが、まだロボットとわかる程度のデザインです。この段階では可愛らしさが強調されることが多く、不気味さは感じにくいです。
具体例:
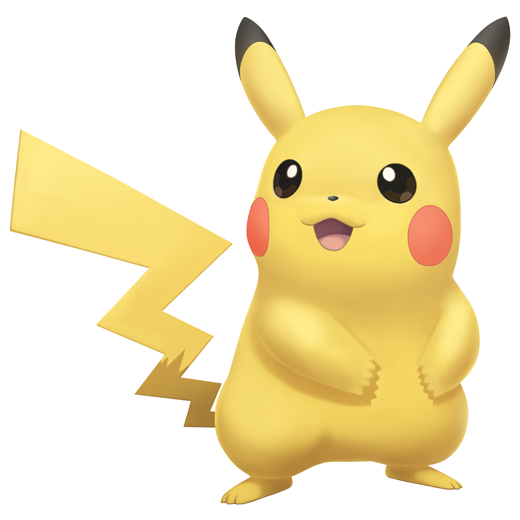
- ピカチュウ(ポケットモンスター): 人間に近い表情を持つが、キャラクターとして親しみやすい。
- ミーア(Mia): 方言を話す猫型ロボット。動物らしさを強調したデザインで、不気味さは感じられません。


フェーズ3: 人間に非常に似ているが、微妙な違和感がある段階
この段階では、ロボットが人間に非常に似てきますが、表情や動きがわずかに不自然で「不気味」と感じられます。リアルな肌感や表情があるものの、違和感が拭えません。
具体例:
- ソフィア(Hanson Robotics): 人間に近い顔立ちを持つアンドロイドで、微妙な不気味さを感じさせます。
- 映画『アバター』のキャラクター: 人間に非常に似ていますが、微妙な違和感が残る。

フェーズ4: 完全に人間に似ているが、恐怖感を引き起こす段階
ロボットがほぼ完全に人間に似ていますが、動きや表情がわずかに不自然なため、強い不快感や恐怖感を引き起こします。
具体例:
- 映画『ファイナルファンタジー』のCGキャラクター: 非常にリアルなCG技術が使われていますが、どこか不自然さが残ります。
- リアルな人型ロボット:下記YouTubeは石黒浩先生のアンドロイド。人間に限りなく近いロボットだが、動きや表情がわずかに不自然なため恐怖感が生まれます。
研究と今後の課題
不気味の谷現象は、ロボット工学や心理学の分野で多くの研究が行われています。特に、ロボットの外観や動きが人間の感情に与える影響を理解することは、未来のロボットデザインにとって重要です。
例えば、カリフォルニア大学サンフランシスコ校の研究では、ロボットが人間に似れば似るほど感情が複雑に変化することが実証されました。研究では、ロボットの目の動きや表情のわずかな差異が、人間の感情に大きな影響を与えることが確認されています。
今後の課題として、ロボットのデザインを「不気味の谷」に陥らせない方法が模索されています。動きや表情をより自然にする技術や、人間とは異なるデザインを維持しつつ親しみやすさを強調する手法が求められています。
まとめ
不気味の谷現象は、ロボットが人間に近づく過程で避けられない心理的な反応です。ロボット工学やAI技術の進化により、この現象を克服することが求められています。ロボットデザインの工夫や研究の進展が、不気味の谷を越え、私たちがロボットをより自然に受け入れられる未来へとつながるでしょう。

